|
Hyperseeing, Hypersculptures,
Nathaniel A. Friedman
1. Visualization In Mathematics Modern computer graphics has emphasized the fact that
mathematics is very much a visual subject. Thus the visual mind and visual
thinking are of basic importance in mathematics just as in art. Furthermore,
visual thinking leads to seeing that mathematical forms can also generate
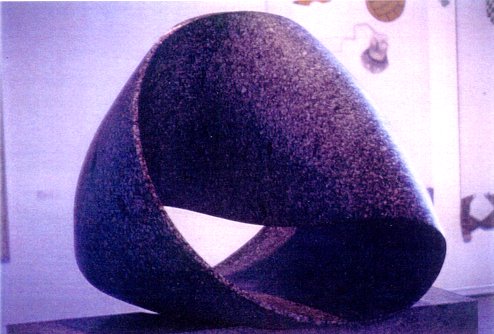
art forms as in the work of the Swiss artist Max Bill. In
Figure 1 is shown the granite sculpture Endless
Ribbon by Max Bill based on the Möbius band.
Figure 1. Endless Ribbon, Max Bill, Pompidou Center, Paris
The Dutch artist Maurice Escher also applied mathematical ideas to generate his art works. Recently the American artist Richard Serra applied the idea of a rotating ellipse as the basis of his now famous Torqued Ellipse sculptures. The Directory at www.isama.org provides links to a variety of interesting websites relating art, mathematics, architecture, and mathematical visualization. For example, included in the Directory under Sculpture are links to the works of Bruce Beasley, Brent Collins, Helaman Ferguson, Robert Longhurst, Charles Perry, John Robinson, and Keizo Ushio, as well as many others. An excellent general reference on art and mathematics is the book The Visual Mind by Michele Emmer, MIT Press [1].
2. Hyperseeing One can say that the operative word that unifies art and mathematics is SEEING. More precisely, art and mathematics are both about SEEING RELATIONSHIPS. One can see certain mathematical forms as art forms and creativity is about seeing from a new viewpoint. Thus it is all about seeing. As the Basque sculptor Eduardo Chillida states "to look is one thing, to see is another thing", "to look is to try to see", "to see is very difficult, normally" [2]. I would like to add that from my own experience as a research mathematician and sculptor, it can take a lot of looking before one finally sees what has been there all the time. Seeing better is a lifetime endeavor. An excellent related article is See-Duction by Howard Levine [3]. We will now discuss a more complete way of seeing a three-dimensional
object that is called hyperseeing.
First we note that to see a two-dimensional painting on a wall, we
step back from the wall in a third dimension. We then see the shape of
the painting (generally rectangular) as well as every point in the painting.
Thus we see the painting completely from one viewpoint. Now theoretically,
in order to see a three-dimensional object completely from one viewpoint,
we would need to step back in a fourth spatial dimension. From one viewpoint,
we could then (theoretically) see every point on the object, as well as
every point within the object. This type of all-around seeing, as well
as a type of x-ray seeing, was known to the Cubist painters such
as Braque, Duchamp, and Picasso, as discussed in [4].
In particular, Cubists were led to showing multiple views of an object
in the same painting. In mathematics four-dimensional space is referred
to as hyperspace and I refer
to seeing in hyperspace as hyperseeing
([5]-[8]). Thus in hyperspace one could
hypersee a three-dimensional object completely from one viewpoint.
3. Hypersculptures Cubist painters approximated hyperseeing by showing multiple
views in the same painting. Hyperseeing can also be facilitated in our
three-dimensional world by viewing a hypersculpture defined as follows.
First, a sculpture is defined as an object in a given orientation relative
to a fixed horizontal plane (the base). Two sculptures are said to be related
if they consist of the same object. Note that related sculptures may look
quite different depending on their orientation. A hypersculpture
is a set of related sculptures. Thus viewing a hypersculpture allows one
to see multiple views of an object from one viewpoint, which therefore
helps to develop a type of hyperseeing in our three-dimensional world.
Furthermore, a hypersculpture is a more complete presentation of the sculptural
content of a three-dimensional form. A first hypersculpture called Rashomon
by Charles Ginnever is shown in Figure 2, where three
related sculptures are shown. Three other related sculptures are shown
below. Actually the form in Rashomon has fifteen stable positions.
A second hypersculpture Attitudes by Arthur Silverman is
shown in Figure 3. Attitudes consists of
six related sculptures. The commen form in Attitudes consists
of a rectangle, parallelogram, and two triangles.

Figure 2. Rashomon, Charles Ginnever, 1998 
Figure 3. Attitudes,
Arthur Silverman, 1996
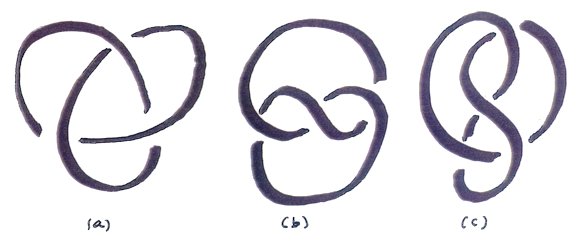
Knots Knots are usually presented by two-dimensional knot diagrams
that indicate where the knot crosses itself. Three diagrams of a trefoil
knot are shown in Figure 4.
Figure 4. Trefoil Diagrams Knots are usually presented as two-dimensional knot diagrams.
However, a knot is actually a three-dimensional object and a knot really
comes alive in a three-dimensional model of the knot which can be constructed
from wire, folded aluminum foil, folded aluminum foil with a wire insert,
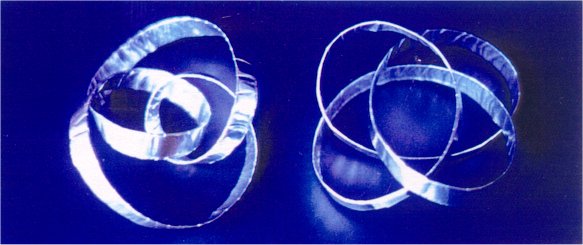
copper tubing, or other material. Models of knots are ideal mathematical
forms that can generate ideas for sculptures. Examples of models of knots
made from folded aluminum foil are shown in Figure 5.
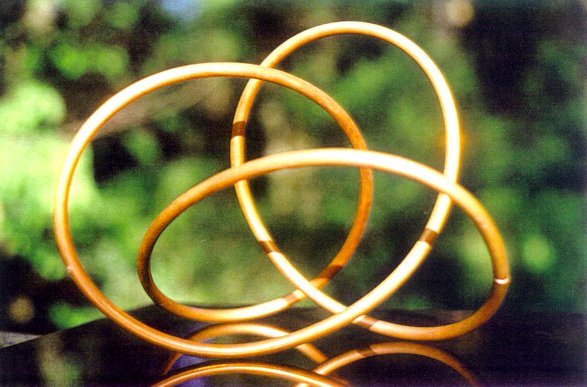
A knot made from copper tubing is shown in Figure 6.
Figure 5. Aluminum Foil Knots
Figure 6. Copper Tubing Knot
Models of knots are perfect mathematical forms for generating ideas for sculptures. They are completely three-dimensional with no preferred top, bottom, front, or back. Furthermore, a knot can look completely different when viewed from different directions. In general, we can regard hyperseeing in our three-dimensional world as a more complete all-around seeing from multiple viewpoints. Since knots can look so different from different viewpoints, knots are excellent examples of interesting forms on which to practice hyperseeing. Knots are also open forms that one can actually see through. This is another reason that knots are ideal forms for hyperseeing. For example, if one makes a wire model of a trefoil knot with front view as in Figure4(a), then the top view will appear similar to Figure 4(b). A right side view of the model with a little tip forward will appear similar to Figure 4(c). In general, a model of a knot yields an infinite number of diagrams of the knot depending on your viewpoint of the knot. An interesting property that results from the open structure of a knot concerns looking at a model of a knot from opposite directions. Suppose we regard one viewpoint as the front viewpoint. The viewpoint directly opposite will be the rear view. In general, the rear view of an object cannot be determined at all from the front view. However, for a knot, the rear view will be the reflection of the front view with the crossings reversed.. For example, if one considers the views in Figure 4 as front views, then the corresponding rear views can be obtained by holding the turned page to the light and reversing the crossings. Another property of knots is that one sees all points
on a knot in any one view except for a finite number of crossing points.
This implies that front and top views determine the side views. To
see why this is true, let us fix one point P on the knot
in an x,y,z coordinate system. A view along the x-axis
determines the y and z coordinates of P. A view along
the y-axis determines the x and z coordinates of P.
Thus two orthogonal views determine the x,y,z coordinates
of P in space. Thus two orthogonal views of a knot will determine
the position of the knot in space. In particular, the front and top views
determine the side view. This is an interesting exercise in hyperseeing
the knot. A suggested first exercise is to consider a straight line
in space with endpoints P = (a,b,c) and Q=
(d,e,f). A view along the x-axis shows P
at (b,c) and Q at (e,f) and a view along
the z-axis shows P at (a,b) and Q at
(d,e). The view along the y-axis is therefore determined
with P at (a,c) and Q at (d,f).
One can now connect (a,c) and (d,f) by a straight
line to obtain the side view of the line. The next exercise is to consider
a knot formed by straight line segments. One can then obtain the side view
from front and top views using coordinates of the endpoints of the lines.
No line should be parallel to an x,y, or z axis.
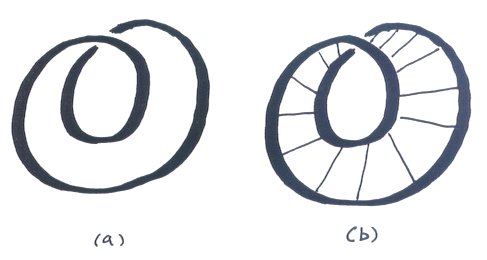
5. Soapfilm Minimal Surfaces of Knots If one dips a wire model of a knot in a solution of liquid
soap and water, one obtains a soapfilm minimal surface with the knot as
the single edge of the surface. For example, the edge of a half-twist Möbius
band is a simple loop as shown in Figure 7(a). If a wire
is bent in this shape and dipped in a soap solution, one obtains a minimal
surface with a central disk. If this disk is puntured, then one obtains
the Möbius band minimal surface in Figure 7(b).
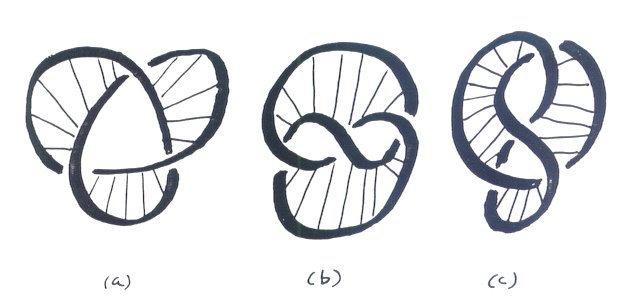
Figure 7. Möbius Band The corresponding soapfilm minimal surfaces for the trefoil
knots in Figure 4 are shown in Figure 8. In (a)
we have a triple twist Möbius band with one side. In (b)
we have a two-sided minimal surface. In (c) we have a one-sided
surface.
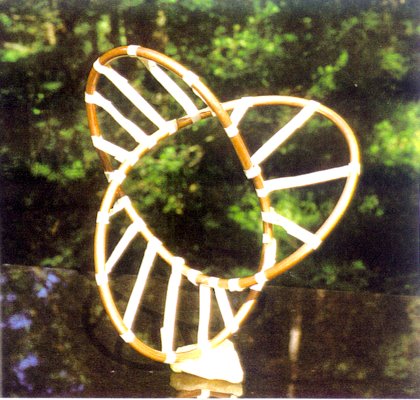
Figure 8. Trefoil Minimal Surfaces The exercise students of all ages really enjoy is dipping
wire models of knots in order to obtain the corresponding soapfilm minimal
surfaces. In order that students can learn to anticipate the shape of the
surface, it is helpful to use masking tape in order to approximate the
surface. An example is shown in Figure 9 for a trefoil
knot.
Figure 9. Trefoil Taped
Surface
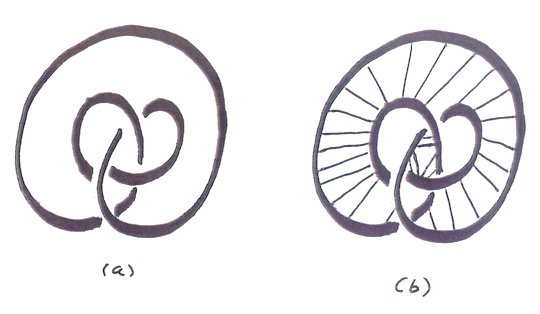
6. Framed Knots In Figure 8(c) we have a minimal surface
that could be described as a form consisting of three leaves with a central
space. We will now modify the knot so that the leaves become space and
the center is form. The modified knot is shown in Figure
10(a) and the corresponding minimal surface is shown in (b).
We refer to the knot in (a) as a framed knot. The original
idea is to form a link obtained by placing the knot inside a circle. This
was first shown to me by the sculptor Charles Perry. Later I saw this link
in several books on knots. This led me to the idea of a framed knot. From
a mathematical point of view the framed knot is not much different from
the original knot since it is easy to see that one can deform the framed
knot by lowering the added "frame" to obtain the original knot. However,
from a sculptural viewpoint, the framed knot is interesting since it has
a minimal surface that reverses form and space in the minimal surface of
the original knot. One can also suspend a wire knot in a wire circle using
an extra piece of wire to suspend the knot. This is the form that Charles
Perry introduced in order to obtain a sculpture where form and space are
switched. Perry forms the surface using flexible metal screen and then
applies automobile body putty on the screen. A mold is made and then the
minimal surface is cast in bronze. The idea of forming a sculpture from
the minimal surface of a framed knot or a knot in a circle is a very recent
development.
Figure 10. Framed Trefoil
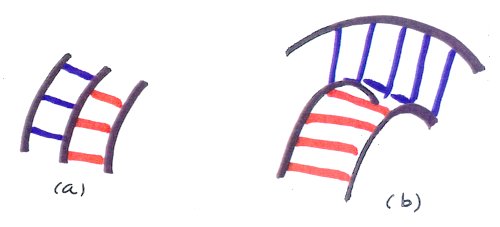
7. Multiple Möbius Bands In Figure 7(b) we have a minimal surface
for a loop that consists of one Möbius band. It will now be shown that
there is a configuration of a trefoil knot that has a minimal surface consisting
of two Möbius bands that share part of their edges as in Figure
11(a) and also alternately cross over each other as in Figure
11(b). The knot is shown in Figure 12(a). In Figure
12(b) Möbius band 1 is shown and in Figure 12(c)
Möbius band 2 is shown. The intersection lines on the crossovers are indicated
by dotted lines.
Figure 11. Sharing Edges and Crossing
Figure 12. Möbius Bands On A Trefoil Knot If Figures 12 (b) and (c)
are combined, then we obtain the complete minimal surface shown in Figure
13. The two bands share parts of their edges and alternately cross
over each other. Band 1 crosses over band 2 at the top and band 2 crosses
over band 1 at the bottom. It is interesting to see each soapfilm Möbius
band twist as it crosses over the other Möbius band. The bands share edges
until they twist.
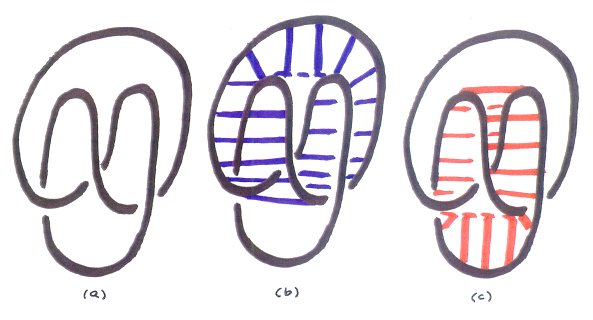
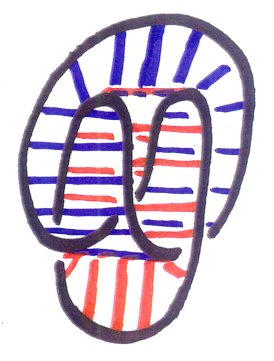
Figure 13. Double Möbius Band Minimal Surface The knot in Figures 12 and 13 is the representation of a trefoil knot as the 2-3 torus knot. In general, given p and q mutually prime, the p-q torus knot wraps meridionally around the torus p times and wraps longitudinally around the torus q times. The p-q torus knot is equivalent to the q-p torus knot. That is, one is deformable into the other ( see [A], page 111 ). Thus from a mathematical viewpoint, the p-q and q-p torus knots are the same knot. However, from a sculptural viewpoint, they look quite different and they have configurations with very different minimal surfaces. In particular, the 3-2 torus knot is shown in Figure 4(a) and it has a minimal surface as in Figure 8(a), which is a triple twist Möbius band. In Figure 13 we have the 2-3 torus knot with a configuration having a minimal surface consisting of two single twist Möbius bands. In general, the n-(n+1) torus knot has a configuration with a minimal surface consisting of n single twist Möbius bands that partly share edges and alternately cross over each other. For example, the 3-4 torus knot has a minimal surface
consisting of three single twist Möbius bands. Suppose we color these three
bands red, white, and blue. Part of the surface will have the red band
and white band sharing an edge with the red band to the left of the white
band. The blue band will be crossing over the red and white bands. The
blue band will then twist and share an edge with the white band, where
the white band is now to the left of the blue band. The red band will now
twist and cross over the white and blue bands. This structure goes around
a central space so that each band twists once to cross the other two bands.
In order to picture this, we will first draw the 3-4 torus knot as in Figure
14. We begin with three points as in (a). We then
draw arcs as in (b). The knot is completed as in (c).
The corresponding minimal surface is shown in Figure 15.
Figure 14. 3-4 Torus Knot
Figure 15. Triple Möbius Band Minimal Surface Models of the multiple Möbius band minimal surfaces in Figures 13 and 15 are shown in the paper Knots and Multiple Möbius Bands published in Visual Mathematics. The behavior of minimal surfaces for configurations of (n+1)-n torus knots may consist of one or more bands with one or more half twists. In Figure 8(a) for the 3-2 torus knot we have one band with three half twists. The 4-3 torus knot has a minimal surface consisting of two bands that partly share edges and cross over each other twice, hence each band has two half twists. The 5-4 torus knot has a minimal surface that consists of one band that crosses itself five times as it wraps around four times. Part of the surface will appear as described above for the 3-4 torus knot except there is only one band alternately crossing over itself as it wraps around.
REFERENCES [1] M. Emmer, The Visual Mind, MIT Press, (1993). [2] E. Chillida, Basque Sculptor, Video, Home Vision, 24, (1985). [3] H. Levine, See-Duction, Humanistic Mathematics Network Journal #15, (1997). [4] L.D. Henderson, The Fourth Dimension and Non-Euclidean Geometry in Modern Art, Princeton University Press, (1983). [5] N.A. Friedman, Hyperspace, Hyperseeing, Hypersculptures, Conference Proceedings, Mathematics and Design 98, Javier Barrallo, Editor, San Sebastian, Spain. [6] N.A. Friedman, Hyperseeing, Hypersculptures, and Space Curves, Conference Proceedings, 1998 Bridges: Mathematical Connections in Art, Music, and Science, Reza Sarhangi, Editor, Winfield, Kansas, USA. (also published in Visual Mathematics) [7] N.A. Friedman, Hyperspace, Hyperseeing, Hypersculptures (with figures), Hyperspace, volume 7, 1998, Japan Institute of Hyperspace Science, Kyoto, Japan. [8] N.A. Friedman, Geometric Sculptures
for K-12: Geos, Hyperseeing, Hypersculptures, Conference Proceedings, 1999
Bridges: Mathematical Connections in Art, Music, and Science, Reza Sarhangi,
Editor, Winfield, Kansas, USA.
|